back to index
Linear Algebra Lecture 27: Diagonalization for Linear Transformation
link |
整理&字幕由Amara.org社區提供
link |
A-TIN的determinant,你把這個式子寫出來,它一定要可以拆解成這個樣子,也就是說它所有的根都必須要是實根,它不能夠有這個characteristic polynomial,不能夠有虛根,它不是一個容數它才能夠做,它才有機會可以做diagonalization。
link |
可是就算是它沒有虛根,也不代表它一定能夠被對角化,你還需要滿足下面第二個條件,你必須要檢查說每一個eigenvalue它所對應的dimension都要等於它的multiplicity。
link |
如果你每一個eigenvalue它所對應的eigenspace的dimension小於multiplicity的話,那這一個矩陣也沒有辦法被對角化,所以這個是對角化的條件,其實我們上週已經講過了,這個只是做一下很快的複習。
link |
那一個矩陣能夠被對角化,它的條件是什麼呢?它的條件是這個矩陣的eigenvector可以形成一個Rn的basis。同理,這邊只是換句話說,所謂eigenvector可以形成Rn的basis的意思就是說,這個矩陣你可以找出n個eigenvector,而這n個eigenvector彼此之間是independent的,是獨立的。
link |
好,那這等同於什麼呢?這等同於這個matrix的characteristic的polynomial,它沒有十根,它一定可以拆解成t減λ1的n1次方乘到t減λk的nk次方,它沒有不能夠被拆解的部分,它都是十根,它是沒有虛根的。
link |
好,那每一個eigenvalue,λ1到λk它都對應到一個eigenspace,每一個eigenspace都有一個dimension,d1到dk,那今天一個矩陣要能夠被對角化的條件就是,每一個eigenvalue對應到的eigenspace要等於characteristic polynomial裡面的multiplicity,也就是說這邊的d1要等於n1,dk要等於n2,dk要等於nke。
link |
好,那我們之前都是對某一個矩陣做對角化,那其實我們也可以對一個linear的operator,linear的transformation,或者是linear的function做對角化這件事情,因為我們知道說每一個linear的function背後都對應到一個矩陣,所以把一個linear function做對角化的意思其實就是把linear function背後所對應的矩陣做對角化,
link |
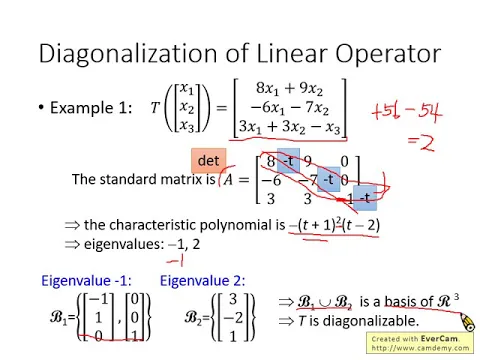
那這件事情其實是沒有什麼特別神奇的地方,那這邊就舉幾個例子給大家看一下,現在你有一個linear的operator長這個樣子,那你要把它做對角化是什麼意思呢?你就把這個linear operator它背後所對應的standard matrix拿出來,它背後所對應的standard matrix長這個樣子。
link |
好,那接下來你要列出這一個standard matrix A的characteristic polynomial,那就把對角線的地方都減t,然後計算它的determinant,那這個我們已經講過非常非常多次了。
link |
那A的determinant怎麼算呢?你可能就套一下3乘以3的matrix它的determinant的公式,那經過一番整理之後,寫出來的樣子是-t加1平方t減2,是-t加1平方t減2。
link |
所以算出來,這一個例子的這個矩陣的eigenvalue是-1跟2,那-1其實是從根,它的multiplicity是2,是-1跟2。
link |
那其實你可以檢查一下你的計算的結果算得對不對,但是你要用這個檢查之前,記得要把從根也考慮進去,要把從根也考慮進去。
link |
如果把從根也考慮進去的話,這一個矩陣的eigenvalue是-1跟-2,那我們有說一個矩陣的trace,大家還記得是什麼嗎?trace就是對角線的直的和,它的trace等於eigenvalue的和,那eigenvalue的和現在是0,你把-1加-1加2,記得從根也要算進去,不然你算出來的答案就不對了。
link |
-1加-1加2等於0,那對角線8加-7加1,我本來以為是,我本來想說怎麼答案好像不對,那是因為這個紅色的線蓋住了負號的地方,雖然我覺得算起來不對,其實這是一個-1,這是一個-1,有一個負號,它只被紅色的線蓋住了。
link |
8加負7加負1等於0,負1加負1加2等於0,所以這個eigenvalue的和會等於它的trace,這個之後我們有時間再證這件事情。
link |
然後eigenvalue相乘會等於這個矩陣的determinant,不是characteristic polynomial,是矩陣的determinant,對,負1乘以負1乘以2是多少呢?是2,那就可以來檢查一下這個矩陣的determinant是不是2呢,這個矩陣的determinant是不是2呢,那怎麼算這個矩陣的determinant是多少呢?
link |
其實你就把8乘負7乘負1,然後呢,我看一下,8乘負7乘負1是負56,正56,我一直沒有看到那個負1,真的太慘了,我不應該畫這個紅色線這麼一個負號,正56,正好加上去。
link |
然後負6乘3乘0,不要管它,9乘0乘3,不要管它,然後0乘負7乘3,不要管它,然後8乘3乘0,不要管它,9乘負6乘負1,記得它是負1,它是54,然後要減掉,所以減54。
link |
所以得到的答案是,正好是2跟3個item value相乘的值是一樣的,所以你就可以檢查一下,發現你算的應該是對的。
link |
好,那我們就是檢查了一下item value算的對不對,好,那假設,那接下來呢,你就是要找那個item value對應的item vector,接下來你就看看說,item value等於負1的時候,它對應的item vector是什麼呢,那你就經過一番計算,那怎麼找item vector,我們前面已經講過了。
link |
那經過一番計算以後呢,對應到item value負1的item space,它的basis有兩個element,對應到item value是2的item space,它的basis就是一個element,那你可以找到3個independent的item vector,所以這個矩陣是可以被對角化的。
link |
因為你可以找到3個independent的item vector,不同的item value,它對應的item vector一定是independent的,這個我們上次已經給大家證明過了,所以今天B2裡面唯一的這個item vector,它一定跟這兩個item vector是independent的,那因為B1是一個basis,所以這兩個vector也是independent的。
link |
所以你把這三個vector,把B1、B2,總共三個vector放在一起,它是一個independent vector set,它是三個independent vector,它可以變成R3的basis。
link |
所以今天這個我們考慮的linear operator T,它是可以被對角化的。這邊是另外一個例子,那另外一個例子顯然是要舉一個不能夠被對角化的例子,你今天得到這個矩陣的standard vector,長這個樣子。
link |
然後把這個standard vector對角線都減t,再取determinant,然後經過一番運算以後,你只得到這一個linear operator,它的characteristic polynomial是負t平方乘以t加2。
link |
然後你就把eigenvalue找出來,eigenvalue是零負2,那當然可以用我們剛才講的方法去檢查一下,你的eigenvalue做出來對不對,就eigenvalue相乘等於determinant,eigenvalue相加等於matrix的trace,你可以用這個方法來檢查一下你的結果對不對,不過記得要把重根的狀況考慮進去。
link |
如果是重根的話,n個重根你就要把那個eigenvalue重複n次。
link |
接下來,你就可以找出每一個eigenvalue背後所對應的eigenspace長什麼樣子。舉例來說,我們先找eigenvalue是零的時候,它背後所對應的eigenspace長什麼樣子。
link |
我之所以在這邊停了一下,是因為我以為這個式子有寫錯,因為我本來以為我應該要寫的是,今天eigenvalue是零的null space,
link |
就是a減零倍的i3的eigenvalue,eigenvalue等於零的eigenspace,就是a減零i3的null space,就是a減零i3的null space,所謂的null space就是這一個matrix等於零的狀況。
link |
所以我本來以為我應該寫a減零i3等於零,但是為什麼這邊寫a減零i3等於a,因為a減零i3本來就等於a。我這邊其實只是要把那個運算過程寫出來而已。
link |
所以我們現在這個題目其實就是找matrix A的null space,我們要找matrix A的null space。那怎麼找matrix A的null space,應該就不用講,就做個reduce row echelon form,找一下matrix A的null space。
link |
那這個matrix A的null space,這個是matrix A的reduce row echelon form,那你從它的reduce row echelon form就會知道說,你從它的reduce row echelon form,你就可以找出matrix A的null space,它的dimension是多少。
link |
那從這個reduce row echelon form,你可以看出說,這個matrix A它因為rank是2,那它的nullity就是1,因為它的nullity是1,代表它的null space的dimension等於1,那因為它的null space的dimension等於1,小於multiplicity。
link |
所以這一個matrix它就是不能夠被對角化的,你也不需要再花時間去check T等於-2這個eigenvalue,它的eigenspace長什麼樣子,因為eigenvalue等於0的這個case,它已經找不到足夠的eigenvector,就這個case一定要找到兩個eigenvector,最後湊出來才有辦法被對角化,那現在既然已經找不到足夠的eigenvector,那這個執政就沒有被對角化的機會了。
link |
那對角化這件事情有什麼重要的地方呢?那我們上週其實講了一個開頭,這個是對應到課本的5.4,那把一個linear operator做對角化,它的重要之處是說,之前我們有講過coordinate system,我們說我們可以從不同的coordinate system來看待同一個linear operator,
link |
那對角化這件事情就是讓我們用有系統的方法來找出那一個coordinate system,可以讓一個linear operator看起來更加的簡單,也就是說本來的linear operator它是T,我們可以在另外一個space去看待這個linear operator,它就變成T下標B。
link |
假設我們在B這個coordinate system去看這個linear operator,它就變成T下標B,那我們希望這個T下標B它是很簡單的,那過去我們需要妥善的思考一下,這一個coordinate system B長什麼樣子,但現在有了對角化的概念,你就可以輕易的找出這一個coordinate system。
link |
怎麼說呢,因為我們知道說,假設今天你的linear operator背後所對應到的矩陣A,它是可以被對角化的,它可以被拆解成P乘以D乘以P inverse,它是可以被對角化的。
link |
那我們現在只要把P當作是我們的basis,還記得P是什麼嗎,P就是matrix A的independent eigenvalue所組合起來的矩陣,只要把A能夠被對角化拆解成P乘以D乘以P inverse,我們把P拿出來當作我們的coordinate system。
link |
那根據這個coordinate system,看到的linear operator T,它就會是D,那D是一個只有對角線有值的矩陣,它是一個diagonal的matrix,所以你就可以把原來的A用比較簡單的方法,用D來看待它,這個就是對角化的妙用。
link |
那這邊我們就是再舉一個例子,我們知道說現在有某一個linear operator T,然後它是可以被對角化的,你可以找到它的eigenvalue是負1跟2,它的eigenvalue負1跟2分別對應到兩個eigenvector跟一個eigenvector。
link |
eigenvalue負1它的eigenspace是有兩個成員的,eigenvalue2它的eigenspace的basis是一個vector,所以這三個vector合起來可以看作是一個coordinate system。
link |
如果你用這個coordinate system來看待你現在的operator T,它在這個coordinate system,在這個eigenvector所形成的coordinate system裡面,看到的樣子就是這個樣子。
link |
你把這三個vector排起來,變成一個coordinate system,那這三個vector分別對應的eigenvalue是負1、負1、2,所以今天你把這一個matrix在這個新的coordinate system下看起來,它就是一個diagonal的matrix,它的對角線就是負1、負1跟2,就是這個樣子。
link |
所以今天對角化這件事情就是可以讓我們有一個簡單的方法,把一個可以被對角化的矩陣變成一個比較簡單的,在另外一個coordinate system上看起來是比較簡單的。